ロボットに
夢を乗せて宇宙へ!
〜月面探査レースで世界に挑む〜
ロボット研究者・吉田和哉 さん
小惑星探査機「はやぶさ」、宇宙ロボット技術試験衛星「おりひめ・ひこぼし」、超小型衛星「雷神」など日本の宇宙開発史上に名を残すプロジェクトに携わってきたロボット研究者が、東北大学工学研究科の吉田和哉教授だ。
高校生のとき天文学者に憧れた吉田少年は、大学受験に失敗してロボットの道に進んだ。しかし、宇宙への熱い思いを忘れず抱き続けたことで、ひょんなことから宇宙でロボットを活用する研究者の道を進むことになった。
吉田さんはいま、賞金2000万ドルをかけた月面探査レースに参戦している日本チーム「HAKUTO」の一員として、月面探査ローバーの開発に携わっている。とてつもない挑戦に思えるが、「これは最初の一歩にすぎません」とほほ笑んだ。
取材・文:川内イオ/写真:布田直志/編集:川村庸子
日本チームの一員として月面探査レースに参加
吉田さんは宇宙空間で使うロボットの研究をされているんですよね。研究室には月の表面を覆っている砂「レゴリス」があると聞きました。
吉田 さすがに本物ではなくて、ケミカルな性質も物理的な性質も正確に再現した模擬砂の「レゴリスシミュラント」と言われるものですよ(笑)。
これをつくった企業によると、火山性の玄武岩を細かく砕いたものをベースにしているそうです。月の表面は斜長石や玄武岩質の岩石で構成されていて、隕石の衝突で細かく砕かれたものが真空の世界で何億年にもわたって降り積もっているんです。だから、表面は新雪の表面みたいにフカフカしていて柔らかいんですよね。
でも、表面に力を加えるとギュッと硬くなるんです。アポロの宇宙飛行士が月面に降り立ったとき、柔らかいはずのレゴリスに足が埋もれずに足跡が残りましたよね。この性質を上手く利用するとセメントのようになるんじゃないかと言われていて、これを使って宇宙に構造物をつくろうという話もあるんですよ。

月の砂を使って宇宙に構造物!? すごく未来的な話でドキドキします。
吉田 その最初のステップとしてわたしが携わっているのが、HAKUTO(以下、ハクト)のプロジェクトです。
いま、アメリカの財団の主催でGoogleがスポンサーについて民間による初の月面探査レース(Google Lunar XPRIZE)が行われているのを知っていますか? 2017年中に月面にローバーと呼ばれる探査車を送り込み、地球からの遠隔操作で500メートル以上移動させながら、月面で撮影した映像を地球に送ることがミッションで、最初に成功したチームには賞金2000万ドル(約23億円)が贈られます。
現在、世界から5チームがこのレースに参戦していて、そのうちのひとつが日本のハクトです。わたしはハクトの前身で、日本と欧州との合同チームだった「ホワイトレーベルスペース」の立ち上げのときから、月面探査ローバーの開発を担当してきました。
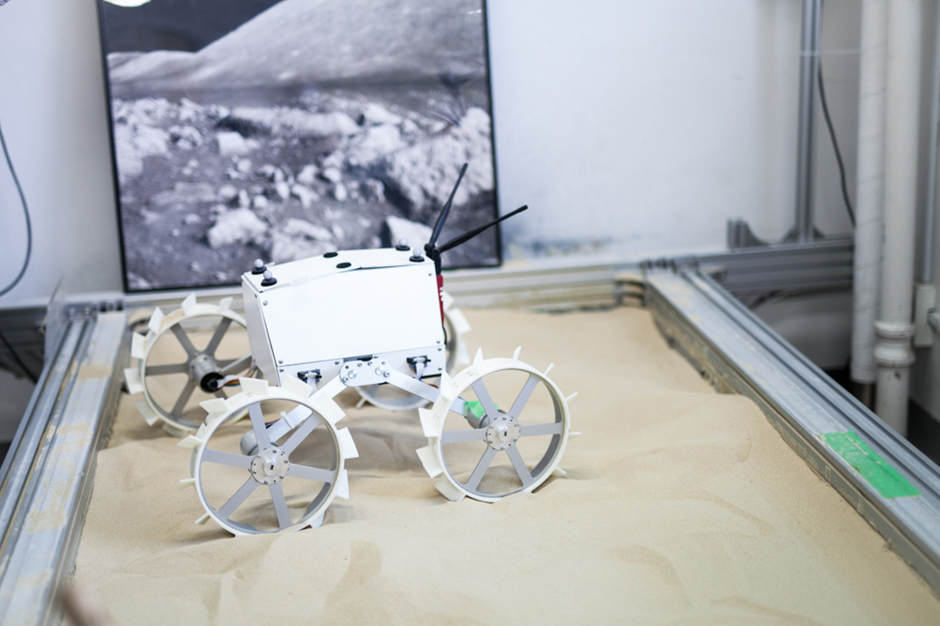
レゴリスシミュラントもこのプロジェクトのために入手したもので、この砂の上でローバーの車輪を転がして、ハクトのローバーが月面に降り立ったときの走行状態をシミュレーションしています。
いま、この研究室にあるのは完全最終形ではないんですが、車体は月に持っていっても変形しないウルテムという素材を使って、3Dプリンタでつくっているんですよ。
吉田さんもハクトのメンバーの一員として、月面探査レースに挑んでいるんですね。スケールがでっかい!
吉田 わたしが研究室の学生と一緒にやっていることはすごく地味ですよ(笑)。月まで飛んでいってからのかっこいいイメージばかりが先行してしまいがちだけど、わたしたちは実際に飛んで行く前に、ローバーがちゃんと月面で動くようにさまざまなポイントを検証、確認をすることを繰り返しています。
例えば、研究室にある砂場はジャッキアップして、斜面を前後左右に動かすことができるんですが、車体の動きや車輪が回転する力を測るために、実験室のなかで斜面をつくり、ローバーにセンサーをつけてモーションキャプチャというシステムを使って動きを記録しています。少しでも車体を軽くするためにどうすればいいのかも検討し続けているんです。
教育機関、研究機関である大学の仕事として、こういう裏方の仕事も大切だと思っています。研究室で砂にまみれて続けてきた地道な研究が、月にまでつながるのです。
天文学者を目指した少年時代
吉田さんの「宇宙への歩み」はいつから始まったのですか?
吉田 わたしは1960年生まれで、アポロ11号の月面着陸(1969年)や火星の大接近(1971年)、大流星雨が期待されたのに空振りに終わったジャコビニ・ツィナー流星群(1972年)などを少年時代にリアルタイムで体験しているんですよ。それで星や宇宙に興味を持っていたのですが、宇宙に関わる仕事を意識したのは高校時代です。
わたしが通っていた県立千葉高校で、東京天文台(現在の国立天文台)の先生の講演がありました。いろいろと話をされていたなかで記憶に残っているのはビッグバンの話で、宇宙が一点から始まってばーっと大きく膨らんで、風船のなかのような世界にわたしたちがいると聞いて、本当にワクワクした。それから、小学生のときに買ってもらった天体望遠鏡を引っ張り出して星を眺めるようになり、天文学者を目指すようになったんです。
最初は天文学者になりたかったんですか?
吉田 はい。一年浪人していて、二度目の受験で天文学者になるために東京工業大学(以下、東工大)の理学部を受験しました。でも、残念ながら第一志望ではなく、第二志望の工学部機械系(第4類)に入ることになったんですよ。もちろん東工大に合格できた嬉しさはありましたが、第一志望の理学部を逃して、宇宙からは遠ざかってしまったなと寂しかったですね。だからすぐに天文研究部に入部して、趣味として星景写真を撮ったりアクティブに活動していました。
その一方で、わたしが入学した頃は日本のロボット工学の創成期だったこともあって、大学で専門科目を学んでいく過程でロボット工学に興味を持つようになりました。
人生を変えた恩師の一言
学業としてのロボットと、趣味としての宇宙。別々に関わっていたふたつが、どうやって交じりあったのですか?
吉田 恩師のロボット工学者・梅谷陽二教授のお陰ですね。大学院の修士課程では、生物にヒントを得てロボットの制御を考える研究をやり始めました。修士2年のとき、これで研究者を目指そうと思って博士課程への進学試験を受けたんです。
運よく筆記試験に合格したんですが、その後の面接の段階になったら研究室の助教授(現在の准教授)に怒られました。実は一回チャレンジして、ダメだったら就職しようと気楽に考えていたので、先生方に相談せずに受験していたんですよ(笑)。
助教授には「博士課程はそんなに甘いもんじゃない」「いま取り組んでいるテーマはすでに助手が手掛けているから、同じテーマでは博士は取れない」と厳しく言われてさすがに凹みました。でも、梅谷教授が「君、宇宙が好きなんだってね。だったら宇宙探査、宇宙開発にロボットを使うというテーマでやってみたらどうか」と言ってくれたんですよ。わたしからしたら、予想もしないタイミングで宇宙に舞い戻って、ぜひ! と飛びつきました。
幸運だったのは、梅谷先生がNASDA(宇宙開発事業団、現在の宇宙航空研究開発機構=JAXAの前身組織のひとつ)で、宇宙でのロボット活用についての検討会のメンバーだったことです。面談したときに、ちょうど1年目の報告書ができたタイミングだったらしく、その報告書を渡してくださって「隅から隅まで読んで、テーマを見つけなさい」と言ってくれました。
すごいタイミング! 博士課程の受験前に先生方に相談していたら、まったく違う道を歩んでいたかもしれないんですね。
吉田 そうですね。しかも博士課程に進学するタイミングで助手の方が栄転されることになってポストが空いたので、結局、僕は博士課程に進むことなく、助手として働きながら、4年かけて博士論文を書きました。
1994年には、文科省の在外研究員制度でアメリカのマサチューセッツ工科大学(MIT)に約1年間滞在して、アメリカの最先端を走る研究者が競争的な環境でしのぎを削っているのを見て、刺激を受けましたね。
その翌年、縁あって東北大学で助教授の空きポストがあるからきませんかというお話をいただいて、仙台にやってきました。
「わたしたちの夢を宇宙に飛ばそう!」
MITで刺激を受けて、仙台から宇宙を目指したのですか?
吉田 はい。でも最初からすべてが軌道に乗っていたわけではありません。
大学は通常、教授の下に助教授、助手がいるピラミッド構造なのですが、わたしの上には教授がいませんでした。それは自由な環境でもあるのですが、その分小さな所帯になり、最初の年にわたしの研究室に入ったのは修士課程の学生ひとりと学部生ふたりだけ、使える部屋も大部屋がひとつという状況からのスタートでした。でも人数が少ないことをメリットにしようと思って、「何でも新しいことに食らいついて、研究した成果が本当に宇宙に結び付くようなことを一緒にやろう! わたしたちの夢を宇宙に飛ばそう!」と話したのを覚えています。
言葉の通り、着任の翌年には小惑星探査機「はやぶさ」のプロジェクトが始まりました。
吉田 1996年からJAXAの川口淳一郎先生のもとで「はやぶさ」のプロジェクトがスタートしました。微小重力の小惑星「イトカワ」の表面からサンプルを採集するのがはやぶさのミッションで、わたしは微小重力下でロボットアームを操作する研究をしていたので、声をかけていただいたんです。コストや宇宙での故障などさまざまな可能性を検討するなかで、ロボットアームではなく、筒を地表に押し着けて弾丸を発射し、飛び散った破片を回収する「サンプラーホーン」という手法を開発しました。
はやぶさの打ち上げは2003年で、イトカワにたどり着いたのが2005年。そのとき、なんとトラブルで弾丸が飛ばなかったのですが、幸運なことにイトカワは細かな砂粒や岩石が小さな重力で集積しているような天体だったので、筒が触れただけでいろいろな破片が舞い上がり、それを回収できました。結果オーライでしょう(笑)。
科学者にとって、アメリカの科学誌『サイエンス』とイギリスの科学誌『ネイチャー』に論文が掲載されることが大きな目標です。2006年にこのはやぶさのミッションに関する論文の共著者として『サイエンス』に名前が載りました。子どもの頃の宇宙科学者になりたいという夢が、惑星探査を手伝うというかたちで実現した瞬間でしたね。
“ロボット屋”の矜持
「はやぶさ」プロジェクトは『サイエンス』に掲載されるまで10年かかっていますが、その間にどんな研究をされていたんですか?
吉田 NASAが火星に向けて探査ロボットを打ち上げて探査に成功した1997年には、すぐに月面探査ローバーの研究を始めましたし、1997年に打ち上げられた宇宙ロボット技術試験衛星「おりひめ・ひこぼし」は開発段階からロボットの制御技術に関わりを持って研究を進め、1999年には軌道上実験にも参加しています。
ほかに2003年から超小型衛星の研究開発を始めて、2009年に重さが約50キロの初号機「雷神」が打ち上げられました。東日本大震災による中断もありましたが、2014年には「雷神2」、2016年にはフィリピン政府と提携してつくった「DIWATA-1」も打ち上げられています。
ずいぶん幅広くやっているように見えるかもしれませんが、わたしたちロボット屋からみると技術的には共通している部分もたくさんありますし、「動くものつくって走らせる」ということが原点なんですよ。何かアイディアを持ったら実際につくって動かしてみて、現場で改良していくということが基本中の基本なんです。
ロボット屋ですか。職人のような心意気を感じました。
20年続けている月面探査ローバーの研究も、今年が集大成になりそうですね。
吉田 そうですね。ハクトはインドのチームの打ち上げロケットに相乗りするのですが、2017年の年末には打ち上げを予定しています。
地球を離れてしまうとリセットボタンひとつ押せないので、あらゆるパターンでうまくいかなかったときのことを想定して、どう対処するかということをギリギリまで考えなくてはいけません。
はやぶさプロジェクトでは一度ほぼ死んでしまった探査機を神業的に地球に戻しましたが、予めそういうこともできるような設計にしておくことが大事。じゃあどうすればいいという単純な道はないんですが、いろいろなところにたくさんのアイディアを埋め込んでいくしかないんですよね。
ベストケースとしてすべてが順調だったらどこまでできるかという話と、あれもこれもダメになったけれども、操縦だけはできるというワーストケースを考えないと。はやぶさの場合は、何があっても地球に戻ってこられるという準備がきちんとできていたわけです。
ハクトのローバーも、無事に月面に着ければ一番を取れるという自信はあります。しかし、ハクトのメンバーにとっても、わたしにとってもこのチャレンジは最初の一歩にすぎません。
月面上で自由自在にロボットを走らせることができたら、月の資源探査が可能になります。それは人類が月に生活圏を展開するという未来につながっていく。
20年先からふりかえってみたときに、2017年にハクトが刻んだこの一歩が重要だったと宇宙史に残るように、最後の最後までローバーの調整を続けます。宇宙では、何が起きるかわかりませんから。